How can we better conceptualize the physical distinction and quantitative equality between
mechanical kinetic and gravitational potential energy?
How is gravitational potential energy converted into mechanical kinetic energy?
How is mechanical kinetic energy converted into gravitational potential energy?
How is energy related to work?
Introduction
Interchange of Gravitational Potential and Mechanical Kinetic Energy. All about us are bodies whose potential energy is changing to kinetic energy or whose kinetic energy is changing to potential energy.
A ball thrown vertically upward leaves the hand with a certain speed and a corresponding amount of kinetic energy. This kinetic energy is completely converted to gravitational potential energy as the ball rises and comes to a complete stop at its highest point. Then, as the ball falls back to Earth, its potential energy is gradually converted to kinetic energy. If the ball returns to the level from which started it possesses the same speed with which it left the hand. Therefore it also possesses the same kinetic energy at the end of the flight as it had at the beginning. Thus, although its energy changed from kinetic to potential and back to kinetic again, none of its original energy was lost.
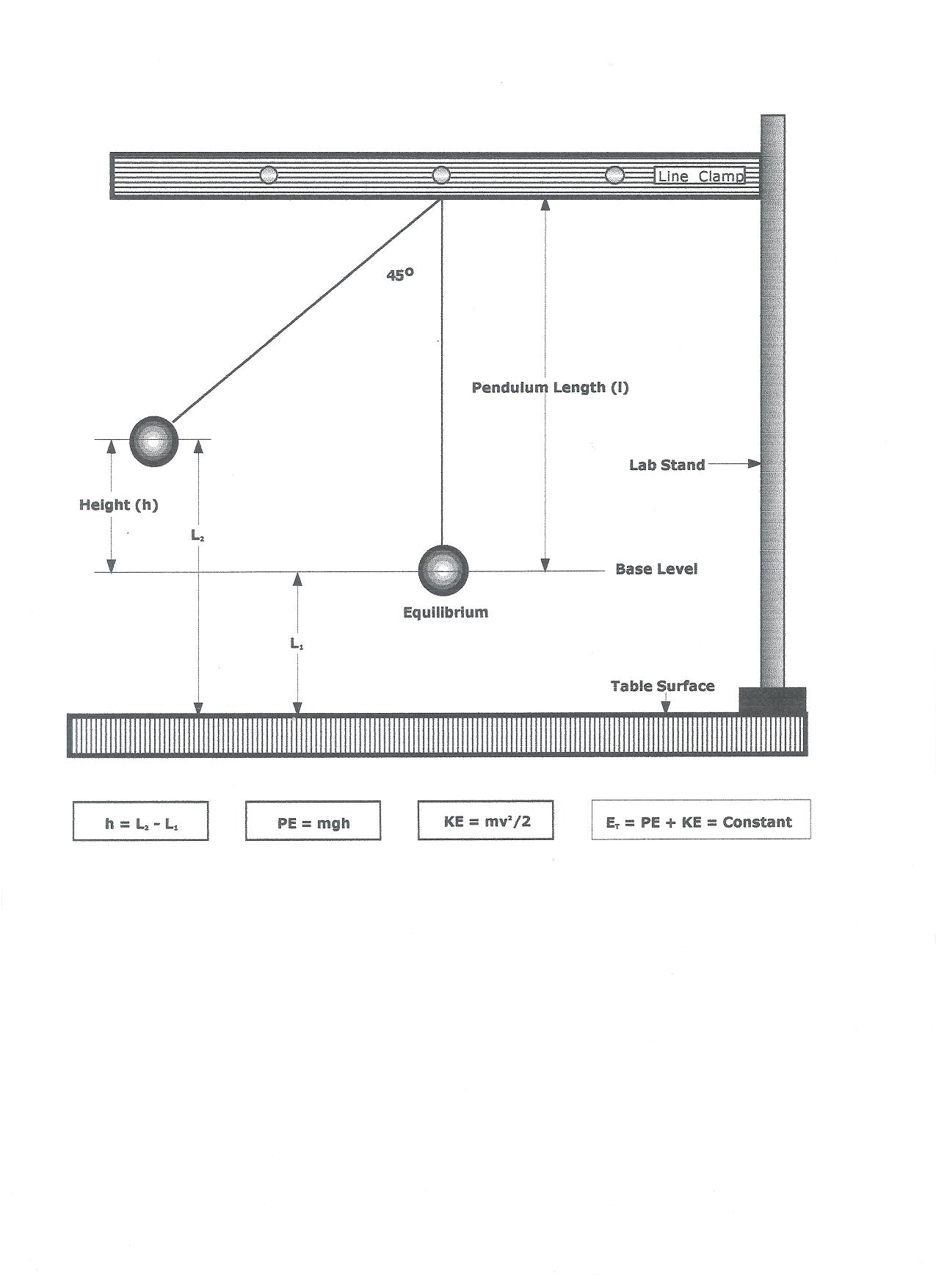
A pendulum bob passes through a similar series of energy changes. At the highest point of the swing, the bob is momentarily at rest and all its energy is potential. As the bob swings downward toward the center (equilibrium) position, its potential energy changes to kinetic. Then, as the bob passes through the equilibrium position and rise to the opposite end of its swing its kinetic energy changes back again into potential energy. If we measure the heights of the bob above the table at each end of its swing, we note that they are approximately equal. This shows that the bob has just as much gravitational potential energy at the end of the swing as it had at the beginning. Again, in spite of the changes from potential to kinetic energy and then back again into potential energy, there should be no loss in energy, as long as any frictional resistance is neglected.
Conservation of Potential and Kinetic Energy. The above example illustrates the following general principle
When the only energy changes that take place in a body or a system of bodies are those from potential to kinetic energy or from kinetic to potential energy, no energy is lost. In such a system the sum of the kinetic and potential energies remains constant at all times.
Or
PE + KE = Total E = Constant
The purpose and objective of this exercise is to apply the Law of Conservation of Potential and Kinetic Energy to determine the [maximum] speed of a pendulum bob as it passes through the equilibrium position.
Equipment
Brass pendulum bob
Ring stand
Buret clamp
Meter stick
Nylon fishing line
Protractor
Triple beam balance
Procedure
1. Assemble the apparatus as instructed, closely following the diagram placed on the blackboard and the setup diagram below. Establish a pendulum length (l) of 0.40 meter. The length of the pendulum is established by measuring from the point of attachment of the fishing line at the buret clamp to the center of the pendulum bob.
2. Make sure the pendulum bob is suspended over the edge of the lab table and that the clamp is set perpendicular to this edge as we wish to ensure that the bob swings directly above.
3. Rotate the bob 45 degrees from the base (or equilibrium) position. Measure the (vertical) height to the center of the bob from the table (L2).
4. Calculate the (gravitational) potential energy at the position of rest (starting position) from the following equation
PEstart = mg[L2-L1]
5. Calculate the kinetic energy at the base level position by setting it equal to PEstart
where m is the mass of the pendulum (kg), g is 9.81 m/sexp2, L2 is the height of the pendulum center from the lab table at the start position, and L1 is the height of the pendulum center from the lab table at the equilibrium position
PEstart = KEbase
6. Solve for the speed of the pendulum at the equilibrium position from the following:
KEbase = (1/2)mvexp2
or
v = sqrt[2KEbase/m]
7. Record all data in the data table provided.
Data Table
Mass of pendulum bob (m) = __________ kg
Distance from lab table top to start position (L2) = __________ m
Distance from lab table top to equilibrium (base) position (L1) = __________ m
Data Analysis
Start (Rest) Position
KEstart = __________ J
PEstart = __________ J
KEstart + PEstart = __________J
Base Level (Equilibrium) Position
KEbase = __________ J
PEbase = __________ J
KEbase + PEbase = _________ J
Speed (maximum) of pendulum bob = __________ m/s
Calculations
Questions
1. How do your calculated values of PEstart and KEstart compare with PEbase and KEbase? Explain.
2. How do the respective sums of the values of KE and PE at both positions compare? Explain.
3. Does your data see to support or violate the Principle of Conservation of Potential and Kinetic Energy? Briefly summarize.
4. At which position is maximum speed of the pendulum bob achieved?
5. Based on your data and the Principle of Conservation of Potential and Kinetic Energy, calculate the maximum speed attained by the pendulum.
6. Complete the table [located at the end of this lab] and sketch a graph of PE (x-axis) versus pendulum position (y-axis)and KE (y-axis) versus pendulum position (x-axis) for one complete cycle of motion.
7. Briefly compare both lines graphed in problem 6. How would you characterize the type of motion revealed by each?
8. Based on your graphed data, where does PE = KE? That is, at which position on your graph is the exchange between potential and kinetic energy of the pendulum bob equal? Explain.
9. At which position in the path of the pendulum bob's swing would you estimate that PE = KE? That is, does it appear to be exactly midway between the start (at-rest) and equilibrium (base-level) positions, or elsewhere? What does this tell us about the energy exchange in a pendulum? Explain.